Rotors Spinning
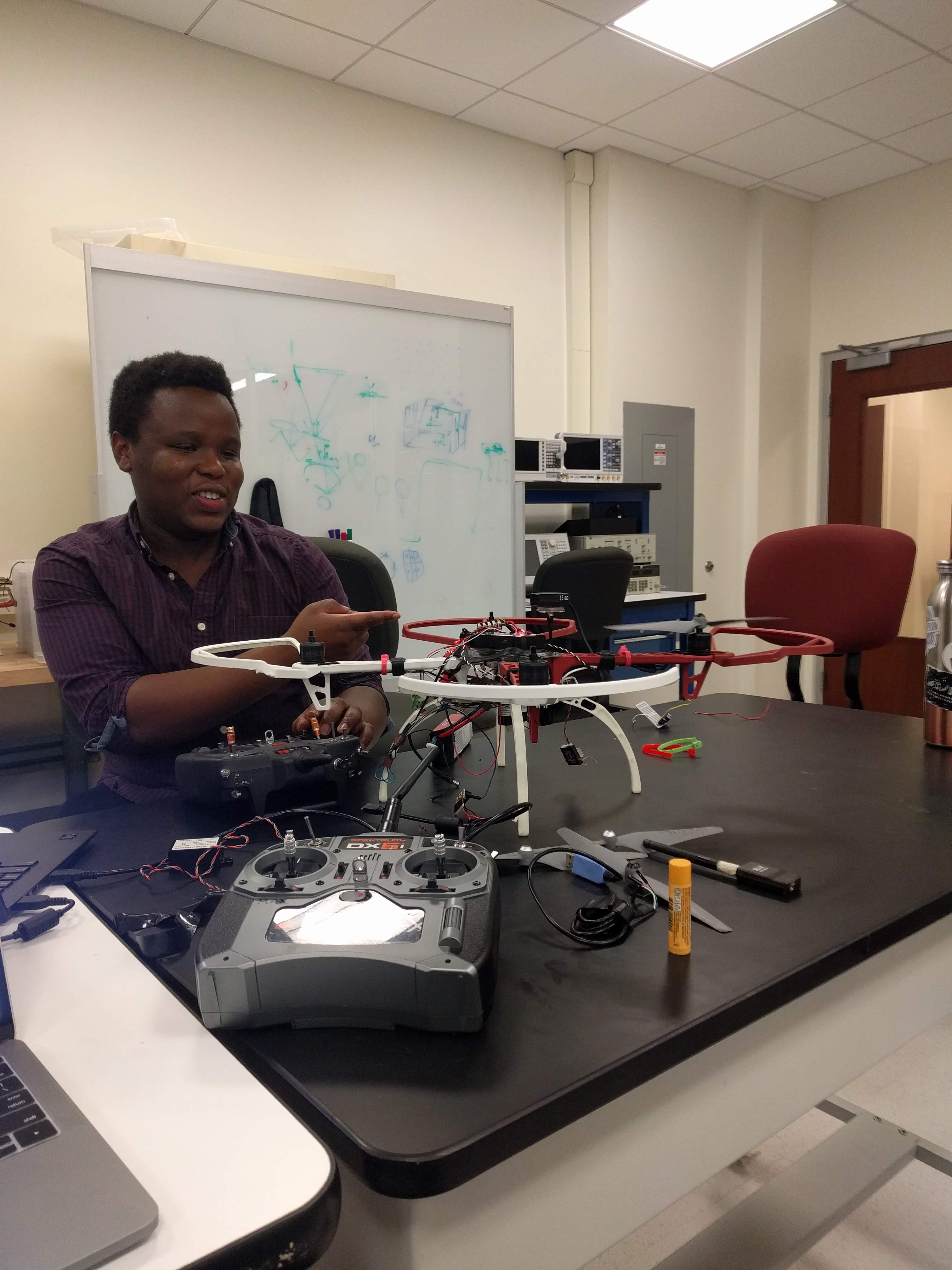
Evans and Radhika took apart the drone from team EagleEye last year and slowly built it back up. We connected the PixHawk and got the radio to work so we could use a controller to turn the rotors. After a lot of frustration, we were able to turn the rotors using both the controller and the QGroundControl interface on our laptop. We almost flew it briefly outside on Shoemaker Green but there were a lot of inaccuracies with the trim and the drone was pitching forward a lot. Our next task will be to solve this problem so we can fly the drone seamlessly from the controller. The photo below shows the first time we got the rotors to spin.