AV4EV - Autonomous Electric GoKart
Overview
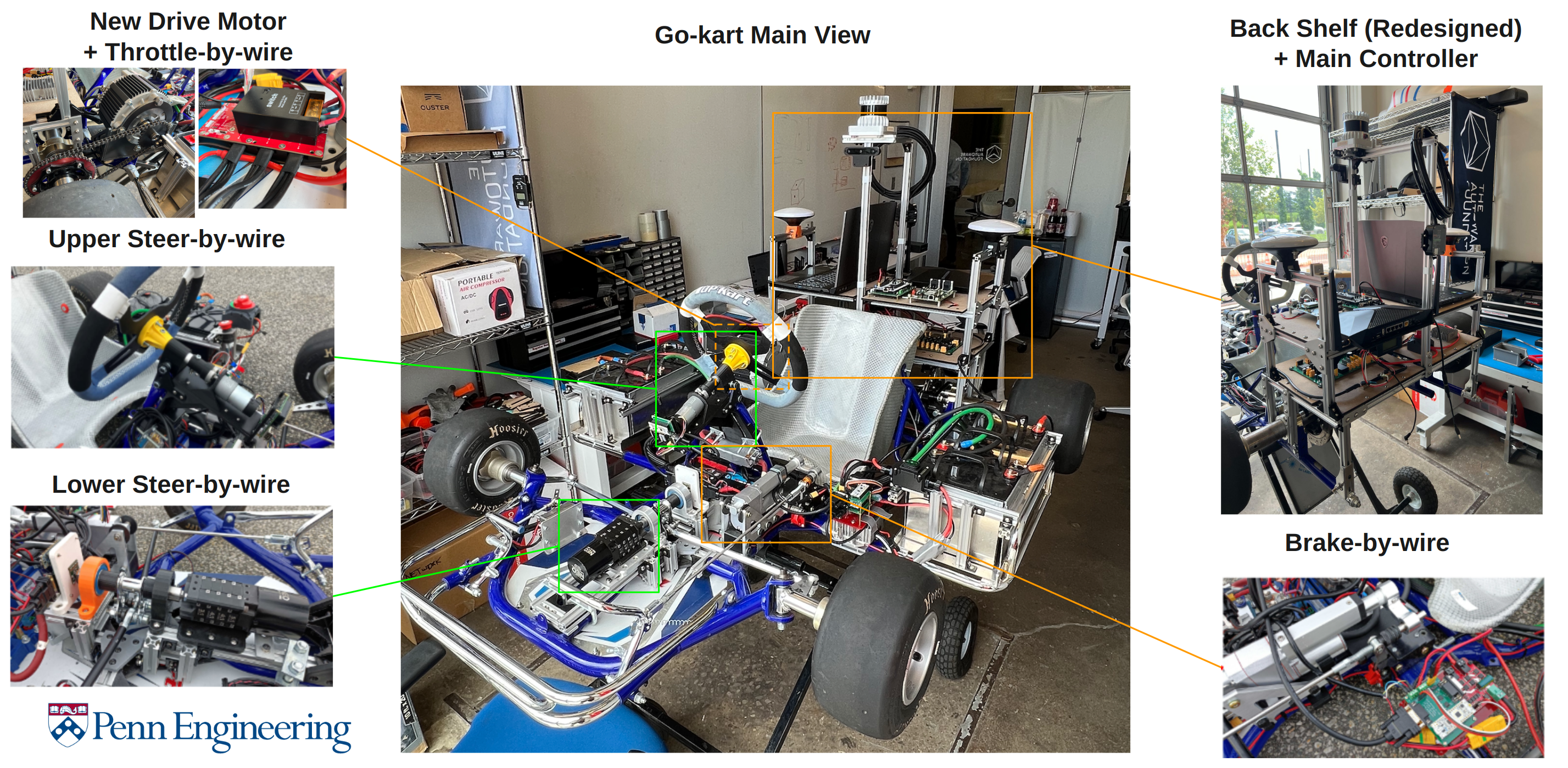
The go-kart mechatronics system is designed as a modular system, consisting of several subsystems that are responsible for different tasks. There are seven major subsystems: Power Distribution (PD), Main Control (MC), User Interface (UI), Throttle-by-Wire (TBW), Brake-by-Wire (BBW), and Steer- by-Wire (SBW), Rear-Shelf Design (RSD). The “x-by-wire” system design approach has been gaining popularity in the automotive industry which is to replace conventional mechanical and hydraulic control systems with electronic signals . The elimination of traditional mechanical components could increase control stability, in- crease design flexibility, reduce cost, and improve efficiency . In our go-kart drive-by-wire design, all subsystems except the PD and the RSD use an STM32 Nucleo development board on a standalone PCB as the electronic control unit (ECU). Like modern vehicle design, communication is achieved using the controller area network (CAN) to allow efficient information exchange between nodes . These modular control systems are integrated with the original go-kart chassis in a non- intrusive manner and are easy to understand, build, and modify.
Staff
Team Principal
Professor Rahul Mangharam [rahulm@seas.upenn.edu]
Current Members

Po-Jen Wang

Jason Friedman

Hongyi Lai

Team Alumni -> 22-23
| Zhijie Qiao | Mingyan Zhou | Felix Jahncle |
| Akshaya Bhati | Yuntao Hu | Divyanshu Sahu |
| Jason Schlessman | Zhijun Zhang |
Team Alumni -> 21-22
| Tomas Nagy | Martin Endler | Adam Alavi |
| Shubh Agarwal | Rithwik Udayagiri | Andrew Zhu |
| Ankit Prabhu | Shubham Gupta | William C Francis |
Blog
- View the github repository containing code by clicking the icon below.
- Check out the Tutorial by following the resources section